Mars exploration rovers from Białystok conquer Mars
Since 2011, the scientists and students representing the Faculty of Mechanical Engineering at Bialystok University of Technology have continually ranked among the world’s 10 top teams constructing analogs of the Mars exploration rovers.
At the outset, there was Magma
The analog of the Mars exploration rover – named Magma – was constructed in 2010, as a result of cooperation between three institutions: the Faculty of Mechanical Engineering, Białystok University of Technology, the Faculty of Physics, Astronomy and Applied Computer Science, Nicolaus Copernicus University –Toruń, and Mars Society Poland. Wojciech Głażewski, Sebastian Meszyński, Piotr Ciura, Emil Błoński, Marcin Dąbrowski, Kamil Wyrąbkiewicz, Rafał Zieliński, Bartosz Solnik, Mateusz Józefowicz and Szymon Zimnoch joined efforts and formed a team for the construction of the rover.
Magma was built with the use of a traditional four-wheel drive system. To achieve a simplified control system and very good maneuverability, there were used direct current (DC) motors. The wheels had no possibility of mechanical turning, so the rover changed travel direction similarly to a tank – thanks to pairs of wheels rotating in opposite directions. Magma was equipped with a periscope with mounted cameras (including that for recording still images) and a manipulator with a gripper with 5 degrees of freedom. Fixed antennas (range of up to 3 km) ensured communication with the rover with the use of Wi-Fi.
The students from the Faculty of Mechanical Engineering at Bialystok University of Technology presented Magma at the University Rover Challenge (Utah, USA, 2010) and took the third place in the competition, just behind the teams from the USA and Canada.
The rover at the fair: Pro Defense
Magma the second - first place-position
In 2011, there was constructed a subsequent analog of the Mars exploration rover: Magma 2. The project was carried out by the Faculty of Mechanical Engineering, Białystok University of Technology and Mars Society Poland. The construction of Magma 2 was the result of teamwork of: Wojciech Głażewski, Piotr Ciura, Emil Błoński, Szymon Zimnoch, Bartosz Solnik and Jacek Wojdyła, Paweł Krzywosz, Krzysztof Pisowacki and Paweł Solnik. The project was supervised by Kazimierz Dzierżek, (DSc, PhD Eng.) and Justyna Tolstoj-Sienkiewicz (PhD Eng.).
Magma 2 was a six-wheeled structure. It used DC motors which ensured very good maneuverability of the rover. Magma 2 was equipped with a periscope with mounted two cameras (one for recording still images) and a manipulator adapted to perform specific tasks. There was also installed a hexacopter for aerial observations.
The students from the Faculty of Mechanical Engineering of the Bialystok University of Technology presented Magma 2 at the University Rover Challenge 2011. Magma 2 came first in this prestigious competition.
Hyperion - a brand new rover
The multi-purpose analog of the Mars exploration rover – Hyperion – was constructed in 2013, by the team of students from the Faculty of Mechanical Engineering, Bialystok University of Technology, composed of: Michał Grześ, Robert Bałdyga, Jakub Maliszewski, Jacek Wojdyła, Piotr Ciura and Ariel Lech. The project was supervised by Kazimierz Dzierżek (DSc, PhD Eng.).
Hyperion was a six-wheel construction with an innovative suspension which facilitated overcoming terrain obstructions. It was able to overcome hills with an inclination angle of up to 60 degrees. Each of the wheels had an independent drive. The rover was equipped with an articulated manipulator with 6 degrees of freedom. The rover had a visualization system, consisting of 3 cameras and 2 transmitters for images at different frequencies. There was installed a GPS system.
Students from the Faculty of Mechanical Engineering, Bialystok University of Technology successfully participated in the University Rover Challenge 2013 (Utah, USA). Hyperion won first place and scored the highest number of points in the history of the competition (493 out of 500).


Hyperion 2 - one more success
Hyperion 2 was constructed in 2014, by a team composed of: Michał Grześ, Robert Bałdyga, Jakub Maliszewski, Jacek Wojdyła, Maciej Baka and Maciej Rećko. The project was supervised by Kazimierz Dzierżek (DSc, PhD Eng.).
Hyperion 2 was built on a six-wheel platform. The suspension system was improved, thus stability of the rover on uneven terrain was upgraded. The frame was made exclusively of aluminum profiles. A new manipulator was designed, so the rover could use different types of arms depending on the task performed. The rover collected information about its surroundings thanks to 3 installed cameras. Communication was ensured through 2 transmitters and location data was provided by GPS.
Thanks to Hyperion 2, the team of students from the Faculty of Mechanical Engineering, Bialystok University of Technology again won first place at the University Rover Challenge 2014, held in Utah, USA. Furthermore, Hyperion 2 was awarded the Podlaskie Brand of the Year 2014.
Next - the next generation
In 2015, the students of the Faculty of Mechanical Engineering, Bialystok University of Technology: Maciej Rećko, Maciej Baka, Piotr Czaplicki, Jakub Kuryło, Artur Milewski and Michał Ostaszewski constructed analog of the Mars exploration rover – Next (#next). The project was supervised by Justyna Tołstoj-Sienkiewicz (PhD Eng.).
Next was designed as a mobile, six-wheel construction. Each wheel was controlled independently. The rover was equipped with a manipulator with 5 degrees of freedom as well as a gripper with 3-point grip and infinite rotation angle. Next was PC-controlled through a radio modem and could also be controlled with the use of an Android mobile phone. Images from 5 cameras installed were transmitted by a system using 900MHz and 2.4 GHz frequencies. Information on Next location was ensured by GPS plus an integrated unit for measurements of tilts and rotation plus encoders (for computing shaft speed on drives) plus a thermal-voltage self-monitoring system.
Next b (#next), built at the Faculty of Mechanical Engineering, Bialystok University of Technology, ranked four at the University Rover Challenge 2015 in Utah, USA (344 points out of 500), and was awarded the second prize at the European Rover Challenge 2015.
RED: reconnaissance - exploration - discovery
The analog of the Mars exploration rover – RED – was built at the Faculty of Mechanical Engineering, Bialystok University of Technology, in the year 2016. It was constructed by the team composed of: Maciej Rećko, Maciej Baka, Piotr Czaplicki, Jakub Kuryło, Artur Milewski, Michał Ostaszewski, Piotr Tomaszuk, Paweł Turycz. The works were supported by: Tomasz Grześ, Aneta Łukowska, Patryk Mądry, Łukasz Mierzejewski, Adrian Pilis, Tomasz Szczęsny and Krzysztof Zalewski. The team members belong to the Robotics Research Group, supervised by Justyna Tołstoj-Sienkiewicz (PhD Eng.).
RED (Reconnaissance – Exploration – Discovery) was a six-wheel mobile robot, equipped with an arm with a three-point gripper. Its electronic circuits worked in real time and were divided into modules arranged in a similar way as in a PC. The designers equipped RED with a vacuum soil sampling system. RED could automatically generate reports on the tests performed. It was a unique device that could autonomously reach a specified point in the field and – also independently – operate a gripper arm.
At the University Rover Challenge 2016 (Utah, USA), RED was ranked seven. It won fifth place at the European Rover Challenge 2016.
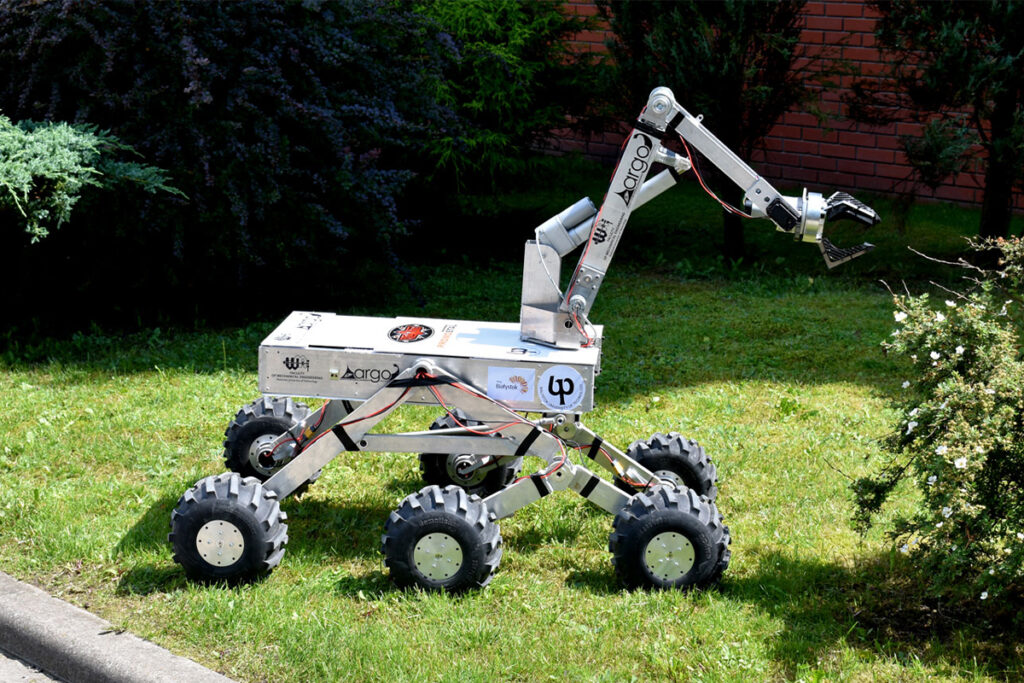
ARGO
The analog of the Mars exploration rover – ARGO – was constructed at the Faculty of Mechanical Engineering, Bialystok University of Technology in 2018. ARGO was constructed by the team of students: Aneta Łukowska, Eng, Barbara Kuc, Piotr Tomaszuk, Igor Tylman, Paweł Rółkowski, Adam Buczyłowski, Jakub Czygier, Karol Haraburda, Paweł Straszyński and Kamil Kamieński. They were also supported in their work by: Paweł Frejda, Damian Łapiński, Łukasz Ornowski, Łukasz Magnuszewski, Maciej Leszczyński and Maciej Ołdakowski. The project was supervised by Kazimierz Dzierżek (DSc, PhD Eng.), Maciej Rećko (MSc Eng.) and Michał Ostaszewski (MSc Eng.)
ARGO was is a six-wheeled rover equipped with manipulator with a three-fingered gripper. It won second place at the Canadian International Rover Challenge 2018, and was ranked four at the European Rover Challenge 2018.
ARGO 2
ARGO 2 was constructed by the team composed of: Aneta Łukowska (Eng., project coordinator), Piotr Tomaszuk (Eng.), Barbara Kuc (Eng.), Jakub Czygier, Karol Haraburda, Przemysław Dąbrowski, Paweł Rółkowski, Adam Buczyłowski, Igor Tylman, Kamil Kamieński, Adrian Kawecki, Łukasz Magnuszewski, Paweł Straszyński, Michał Olszyński, Robert Grabowy, Rafał Waraksa, Wiktoria Jankowska, Julia Napora. The supervisors of the project are: Kazimierz Dzierżek (DSc, PhD Eng.) and Maciej Rećko (MSc Eng.)
ARGO 2 is equipped with a differential mechanism allowing each rocker arm to operate independently. The first part of the arm is driven by an electric actuator, and the second – by DC motors and a belt drive. The end effector is equipped with a two-finger gripper, with adaptive rubber caps. An integrated tilt and swivel system of the gripper ensure flexibility in performing tasks. The visualization system is based on digital cameras and the object recognition system based on NVIDIA Jetson TX2 graphics microcomputer. ARGO 2 is equipped with: a multi-layered security system; on-board Ethernet network; own communication protocol; the CAN-bus protocol that fosters the rover modular construction facilitates diagnostics, as well as allows for a reduction of device wiring.
University Rover Challenge
The University Rover Challenge competition, held in Utah, USA, brings together fans of the Mars exploration rover from many countries. In terms of terrain and dry climate, the conditions around Hanksville (USA) are very similar to the environment on Mars. Organizers of the University Rover Challenge use these extreme environmental conditions to test models of the Mars exploration rovers. Every year, the Mars Society hosts the University Rover Challenge at the Mars Desert Research Station (MDRS), the largest and longest-running Mars surface simulation facility in the world (one of two simulated Mars analog habitats owned and operated by the Mars Society).
Author
Bialystok University of Technology